Main Researcher: Dr. Roee Diamant
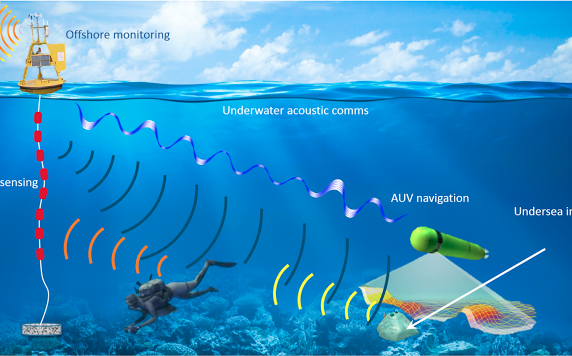
The underwater acoustic and navigation laboratory (ANL) is part of the newly established Department of Marine Technology, as part of the School of Marine Sciences in the University of Haifa. Our facilities are located in the newly established center of marine technology in the building of the Israel Oceanographic and Limnological Research (IOLR) in Shiknoma, Haifa. The ANL is active in the fields of underwater acoustic communication, underwater signal detection, object classification, underwater localization, and underwater navigation. Our research interests include channel modeling, design of algorithms and protocols, analysis, development of simulation tools, and the performing of sea experiments. We focus on applied research and develop tools for problems like underwater mine detection, navigation without GPS, communication between divers and autonomous vehicles, classification and characterisation of marine mammals and fish, tracking the motion of marine animals, and long range acoustic communication.
The equipment in the lab includes an hydroacoustic chamber, amplifiers, transducers and hydrophones for various frequency bands, deep water AUV, shallow water AUV, an ROV, several testing vessels. We are also able to perform tests directly from the lab in a testing pool and in the Shikmona reef.
Below is a brief outline of the activities in the ANL.
Hydroacoustic research:
• Underwater Acoustic Communication (mid range 1-5km): focus on robust medium range communication to allow transmission of text, voice, pictures, and video. The main goal is to achieve robustness to various sea conditions. Activities include:
o Doppler shift estimation and compensation.
o Channel estimation.
o Fast communication using OFDM and turbo-equalizers.
o Spatial reuse using MIMO.
o Spatial focusing using time-reversal.
o Channel coding.
o Communication for low probability of detection.
o Experiments.
- Underwater Acoustic Communication (long range >50km): the focus will be on robust long range communication to allow robust low rate communication. Activities include:
o Channel modeling.
o Channel estimation.
o Develop of unique modulation schemes.
o Experiments
• Underwater Networks: development of entire stack layer for network supporting both unicast and broadcast transmissions for any (unknown) network topology. Activities include:
o Topology estimation.
o Development of spatial and time-reuse scheduling schemes.
o Routing protocols under a time-varying topology.
o Hybrid ARQ schemes for retransmission of lost packets.
o Smart packet segmentation.
o Time-synchronization between network nodes.
o Multimodel switch for acoustic and optic communication.
o Experiments.
• Detection of signals: development of detectors for signals of known and unknown structure to handle target detection and false alarm probabilities. Activities include:
o Robust detection schemes to handle multipath, transients, time-varying noise.
o Blind classification of signals for ‘noise’ or ‘signal’.
o Extraction of signal features from detected signals.
o Experiments.
• Underwater Image compression: Due to the low bit rate of underwater acoustic communication, the focus here will be to find unique image (pictures and video) compression techniques for the underwater environment.
• Object Detection and Classification: the objective is to detect and classify in real-time an object of interest in picture or sonar data of an AUV. The activities will include:
o Modeling of objects of interest.
o Collection of data from AUVs.
o Deep-learning based classification.
o Development of real-time detectors and classifiers.
o Experiments.
• Acoustic Measurements:
o Extraction of noise characteristics (pdf).
o Estimation of power attenuation.
o Estimation of target strength.
o Experiments.
Underwater navigation research:
• Observability analysis: the goal in this study is to learn what are the navigation features that can be updated given a set of measurements and a certain type of maneuvering.
• Navigation in shallow water: the focus here is to compensate for fast time-varying pitch and roll angles due to surface waves. Activities include:
o Estimation of time-varying pitch angles using only acceleration measurements.
o Dead-reckoning in shallow water.
o Tracking motion under pitch and roll uncertainties.
o Experiments.
• Online calibration of sensors.
• Self localization: the focus here is to estimate the geographical location of a sensors given transmissions from anchor nodes. Activities include:
o Range estimation in multipath.
o Localization under sound speed uncertainties.
o Tracking location while utilizing knowledge of the drift motion of anchors.
o Experiments.
Related pages
Roee Diamant, Dr. researcher page